Регуляторы с линейным законом регулирования по математической зависимости между входными и выходными сигналами подразделяются на следующие основные виды:
- 1) П-регулятор (пропорциональный);
- 2) И-регулятор (интегральный);
- 3) ПИ-регулятор (пропорционально-интегральный (изодром- ный));
- 4) регуляторы с предварением (с опережением):
- ПД-регулятор (пропорционально-дифференциальный);
- ПИД-регулятор (пропорционально-интегрально-дифференциальный).
В системах автоматического регулирования наиболее распространенными являются П-регулятор, ПИ-регулятор, ПИД-регулятор.
В зависимости от задающего воздействия и параметров объекта регулирования подбирают регулятор с определенной характеристикой W p . Изменение W p адекватно ведет к изменению коэффициентов дифференциального уравнения общего передаточного звена (регулятор-объект), и тем самым достигается необходимое качество регулирования. В промышленных регуляторах эти величины называются параметрами настройки. Параметрами настройки являются: коэффициент усиления; зона нечувствительности; постоянная времени интегрирования; постоянная времени дифференцирования и т.д. Для изменения параметров настройки в регуляторах имеются органы настройки (управления) . Наиболее распространены регуляторы на один контур, но в настоящее время все больше появляется многоконтурных регуляторов. Такие регуляторы часто позволяют реализовать взаимосвязанное регулирование параметров.
Рассмотрим смысл закона регулирования регулятора на примере САР температуры целевого продукта в теплообменнике (рис. 3.9). Эта схема нам уже известна. Это САР по отклонению. Здесь а - сигнал рассогласования 90° - 100° = - 10°С =о. Закон регулирования регулятора (контроллера) определяет характер перемещения затвора регулирующего органа в новое положение. На место регулятора (контроллера) в данной схеме будем поочередно ставить линейные регуляторы и исследовать влияние регулирующего воздействия р от каждого закона регулирования на характер перемещения затвора регулирующего органа. Рассматриваем линейные регуляторы с идеальными характеристиками.
П-регулятор. Это регулятор, у которого ц пропорционально о, т.е. где К - коэффициент передачи (коэффициент усиления).

Рис. 3.9.
При скачке входной величины а на значение (минус 10°С) затвор регулирующего органа переходит в новое ц-положение скачком (рис. 3.10). Регуляторы, действующие по П-закону, просты по устройству и при эксплуатации надежны. Однако их характеризуют малое перестановочное усилие на регулирующем органе, низкая точность поддержания заданного параметра. Параметром настройки регулятора является коэффициент передачи К.

Рис 3.10.
Достоинство такого регулирования: регулирующий орган быстро перемещается на новое положение, т.е. высокая скорость регулирования. Недостаток: имеет место остаточное отклонение, т.е. имеет место некоторая ошибка регулирования (рис. 3.11). Поэтому П-ре- гуляторы применяются там, где нет строгого требования к точности регулирования.

Рис. 3.11.
И-регулятор.
Это регулятор, у которого ц пропорционально интегралу а:

При скачке входной величины на значение минус КТС затвор регулирующего органа медленно переходит в новое положение (рис. 3.12). Как бы ни было мало отклонение регулируемой величины от заданного значения, интегральный регулятор будет продолжать перемещать регулирующий орган вплоть до необходимого положения. Достоинство: отсутствие остаточного отклонения регулируемого параметра от заданного значения. Недостаток: низкая скорость регулирования, т.е. затвор в новое положение перемещается медленно.
ПИ-регулятор. Это параллельное соединение П- и И- регуляторов. ПИ-регулятор сочетает положительные моменты П- и И-регу- ляторов. ПИ-регулятор оказывает воздействие на регулирующий орган пропорционально отклонению и интегралу отклонения регулируемой величины. У ПИ-регулятора (рис. 3.13) регулирующее воздействие р перемещает затвор пропорционально отклонению параметра о и интегралу отклонения о.

Рис. 3.12.

Рис. 3.13.
где К (коэффициент усиления) и Т к (постоянная времени интегрирования) - параметры настройки регулятора.
Как видим, математическое выражение данного закона - это сумма двух предыдущих формул. Затвор регулирующего органа часть пути (а, б) пройдет скачком по П-закону, а оставшуюся часть (б, в) - медленно по И-закону.
Переходный процесс при пропорционально-интегральном регулировании (ПИ-регулировании) показан на рис. 3.14.
Регуляторы с предварением
П- и ПИ- регуляторы не могут упреждать ожидаемое отклонение регулируемой величины, реагируя только на уже имеющееся отклонение. Возникает необходимость в регуляторе, который вырабатывал бы дополнительное регулирующее воздействие, пропорциональное скорости отклонения регулируемой величины от заданного значения. Такое регулирующее воздействие используется в дифференциальных ПД- и ПИД-регуляторах.

Рис. 3.14.
ПД-регулятор. Это такой регулятор (рис. 3.15), у которого выходной сигнал р пропорционален входному сигналу о и производной do/ 5т, т.е.
где К - коэффициент усиления; T d

Рис. 3.15.
Производная dc/dx характеризует тенденцию изменения (отклонения) регулируемой величины. Величина и знак воздействия от производной позволяют регулятору как бы предвидеть, в какую сторону и насколько отклонилась бы регулируемая величина под действием данного возмущения. Это предвидение позволяет регулятору предварять своим воздействием возможное отклонение регулируемой величины. В результате процесс регулирования завершается в более короткое время. Сначала затвор скачком переходит из точки а в точку в (П-закон), т.е. больше, чем надо, затем отскакивает назад в точку б (дифференциальное действие) и остается в этом положении.
ПИД-регулятор. ПИД-регуляторы воздействуют на объект пропорционально отклонению регулируемой величины, интегралу от этого отклонения и скорости изменения регулируемой величины. ПИД-регулятор сочетает достоинства П-регулятора, И-регулятора, ПД-регулятора (рис. 3.16). Соответственно, в уравнении регулятора присутствуют три формулы законов регулирования:
где К - коэффициент пропорциональности; Г и - постоянная времени интегрирования; Т д - постоянная времени дифференцирования.
Эти параметры можно настроить вручную.
Параметрами настройки ПИД-регуляторов являются: коэффициент пропорциональности регулятора к р; постоянная времени интегрирования Г и; постоянная времени дифференцирования Т д.

Рис.
При скачкообразном изменении регулируемой величины ПИД- регулятор в начальный момент времени оказывает мгновенное бесконечно большое воздействие на объект регулирования, затем величина воздействия резко падает до значения, определяемого пропорциональной составляющей, после чего постепенно начинает оказывать влияние интегральная составляющая регулятора. Переходный процесс при этом (рис. 3.17-3.18) имеет минимальные отклонения по амплитуде и по времени. При наличии аналогового управляющего сигнала регулятор может иметь один или два дискретных сигнала для реализации функций сигнализации, защиты или других. Так, например, ПИД-регулятор температуры может формировать сигналы тревоги при выходе регулируемого параметра за указанные границы.

Рис. 3.17.

Рис. 3.18.
ПИД-закон используется во многих контроллерах. Сначала затвор скачком переходит из точки а в точку в (П-закон) (т.е. больше, чем надо), затем отскакивает назад в точку б (дифференциальное действие), а далее затвор медленно перемещается в конечное положение г (И-закон). В результате процесс регулирования завершается в более короткое время и с меньшей погрешностью регулирования.
Часто в системах автоматического регулирования циклических процессов требуется по определенной программе менять величину задания регулятора. Для этого используется программный задатчик. Параметрами оценки таких регуляторов являются число шагов программы, максимальная и минимальная длина шага программы, возможность плавного изменения задания на шаге.
Итак, рассмотрены идеальные характеристики линейных регуляторов. В реальности все происходит во времени (рис. 3.19).
В графиках нужно учитывать также запаздывание (чистое (транспортное) т 0 и емкостное запаздывание т е.

Рис. 3.19. ПИД-закон идеальный а и реальный б с учетом действия по времени
Что же такое ПИД-регулятор? Прежде всего это алгоритм, который может быть реализован как программно, так и аппаратно. Сегодня мы рассмотрим ПИД-регулятор как законченное устройство, которое может быть использовано для построения систем управления и автоматики. В качестве примера возьмём устройство компании «ОВЕН» ТРМ210. Но для начала немного теории…
Что такое ПИД-регулятор?
ПИД-регулятор относится к . Аббревиатура «ПИД» расшифровывается как «пропорционально-интегрально-дифференциальный» (регулятор) — эти три слова полностью описывают принцип его действия. Общая структурная схема управления выглядит так:
На вход регулятора подаётся измеренная датчиком физическая величина (температура, влажность и т.д.), регулятор в соответствии со своим алгоритмом (реализующим функцию преобразования) выдаёт управляющее воздействие. Это вызывает изменение регулируемой величины (например, температуры или влажности). На следующем шаге регулятор снова делает замер регулируемого параметра и сравнивает эту величину с заданной, вычисляя ошибку регулирования. Новое управляющее воздействие формируется с учётом ошибки регулирования на каждом шаге. Значение величины, которое нужно поддерживать, задаётся пользователем.
Функция преобразования ПИД-регулятора выглядит следующим образом:
Где E — ошибка регулирования (разница между заданным значением регулируемой величины и фактическим)
В этой формуле, как вы уже догадались, есь три составляющие: интегральная пропорциональная и дифференциальная. Каждая из них имеет соответствующий коэффициент (Кп, Ки, Кд). Чем больше коэффициент, тем больший вклад данная составляющая вносит в работу регулятора. Теперь разберёмся за что отвечает каждая из них.
Пропорциональная: «Чем больше — тем больше, чем меньше — тем меньше»
Тут всё просто. Пропорциональная составляющая просто умножает величину ошибки на свой коэффициент. Например, чем больше заданная температура по сравнению с текущей, тем большую мощность регулятор установит на обогревателе.
Интегральная: «Учтём предыдущий опыт»
Интегральная составляющая необходима, чтобы учитывать предыдущий опыт работы регулятора и делать управление всё точнее и точнее со временем. Как известно, интеграл — это сумма. Регулятор суммирует все предыдущие значения ошибки регулирования и делает на них поправку. Как только система выйдет на заданный режим (например, достигнет заданной температуры) ошибка регулирования будет близка к нулю и интегральная часть со временем будет всё меньше влиять на работу регулятора. Говоря простым языком, интегральная составляющая стремиться исправить ошибки регулирования за предыдущий период.
Дифферинциальная: «Учтём скорость изменения»
Эта составляющая берёт производную от измеряемой величины. Физический смысл производной- это скорость изменения физической величины. Например, чем быстрее растёт (или падает) температура в системе, тем больше будет соответствующая производная. Дифферинциальная составляющая позволяет регулятору по-разному реагировать на резкие и плавные изменения регулируемой величины в системе, тем самым избегая «раскачивания» этой величины.
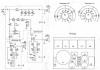
ТРМ210: Функциональная схема прибора
Краткий экскурс в теорию закончен, вернёмся к практике и рассмотрим прибор ТРМ210, реализующий данный алгоритм.

Вот его функциональная схема:
 Информация с датчика преобразуется прибором с помощью шкалы масштабирования, проходит фильтрацию и коррекцию. Это необходимо, чтоб ПИД-алгоритм получил измеренное значение в удобном и понятном для него виде.
Информация с датчика преобразуется прибором с помощью шкалы масштабирования, проходит фильтрацию и коррекцию. Это необходимо, чтоб ПИД-алгоритм получил измеренное значение в удобном и понятном для него виде.
Значение измеренной величины отображается на дисплее прибора.
Управляющее воздействие регулятора может быть импульсным или аналоговым. В первом случае управляющее воздействие регулятора заключается в изменении ширины генерируемых на выходе импульсов. Во втором случае регулятор выдаёт сигнал унифицированного напряжения в диапазоне 0…10 В или тока в диапазоне 4…20 мА. С помощью этих сигналов можно управлять практически любым устройством.
В ТРМ210 предусмотрен блок сигнализации, который сообщает о выходе физической величины за заданные пределы, замыкая дискретный выход, который, например, может «зажигать» лампу «Авария».
Также в приборе имеется блок регистратора, который может передавать измеренное значение физической величины любому другому прибору или устройству с помощью токового сигнала 4…20 мА.
В дополнение ко всему выше перечисленному регулятор имеет «на борту» интерфейс RS-485, который позволяет читать с прибора значения измеряемой величины, выходной мощности регулятора и любых конфигурируемых параметров. Это может пригодиться, если нужно передавать информацию о работе прибора в диспетчерский пункт.
Пример использования
Допустим, необходимо реализовать проветривание помещения следующим образом: чем больше температура внутри, тем больше нужно открыть окно. Для этого установим на окно привод, который будет плавно поворачиваться на заданный угол, а управляться будет сигналом тока 4…20 мА (такой управляющий сигнал поддерживают практически все подобные приводы). То есть, если подать на привод сигнал 4 мА — он полностью закроет окно, а 20 мА — полностью его откроет.
Для измерения температуры можно взять любой из поддерживаемых ТРМ210 — это практически любые термопары и любые датчики имеющие унифицированные выходы 0…10 В и 4…20 мА.
Настройка ПИД-регулятора
Прибор ТРМ210 имеет функцию автонастройки. В этом режиме регулятор сам имитирует возмущающие воздействия, отслеживает реакцию системы и исходя из этих данных подстраивает свои коэффициенты. Однако, таким способом настроить регулятор получается далеко не всегда, поскольку регулятор ничего не знает о реальной системе, и генерируемые им тестовые возмущения могут не совпадать с реальными возмущениями, возникающими в этой системе. В таких случаях необходимо подобрать коэффициенты вручную. О том, как это правильно сделать мы расскажем в .
До свидания! Читайте LAZY SMART .
П, ПД, ПИ, ПИД регуляторы. Они же P, PD, PI, PID регуляторы.
Во первых, упомянем, что сами понятия П, ПД, ПИ, ПИД (P, PD, PI, PID) регуляторы являются неким сокращением от понятия: "устройство регулирования () обеспечивающие на своем выходе регулируемого параметра, или его изменения, описываемую типа П, ПИ и т.д....... ". При этом:
- П, (P) - означает "пропорциональный"
- И(I) - "интегральный"
- Д(D) - "дифференциальный"
- ПИ (PI) - "пропорциональный и интегральный"
- ПД (PD) - "пропорциональный и дифференциальный"
- ПИД (PID) - "пропорциональный, интегральный и дифференциальный"
Очень важное замечание - в подавляющем большинстве случаев эти регуляторы обеспечивают изменения регулируемого параметра на регулирующий параметр (воздействие). Для ясности в данной статье мы будем говорить о регулировании комнатной температуры (поддержании ее значения X градусов) с помощью некоего комнатного электронагревателя, выходная мощность которого зависит от уровня входного сигнала. Т.е. при изменении температуры на некую положительную величину e (при повышении температуры до уровня X+e ) к стандартному входному сигналу U нагревателя будет добавлен отрицательный сигнал регулятора u . Результирующим сигналом на входе нагревателя будет, таким образом, U-u , что уменьшит выходную мощность нагревателя, и, следовательно, комнатную температуру.
Очень часто e называют "ошибкой" или "отклонением", Х - "заданным уровнем" или "заданным значением", причем Х , в общем случае, может быть и регулируемым сигналом в каком-то другом контуре регулирования. ! Во избежания автоколебательных явлений желательно, чтобы "верхний" контур регулирования был "медленным" по отношению к нижнему!
Рассмотрим работу ПИД (PID) регулятора , как наиболее универсального представителя класса. Любой другой может быть получен путем обнуления коэффициента передачи при соответствующем слагаемом передаточной функции. Итак,
Передаточная функция ПИД регулятора описывается уравнением:
где "тау" - время с того момента, как изменение e регулируемой величины стало отличным от нуля (значимо отличным), а жаргон инженеров-автоматчиков еще требует нижеследующих названий для компонент уравнения и их производных величин:
- Kp - пропорциональный коэффициент усиления
- Pb=1/Kp - относительный диапазон регулирования
- Ki - интегральный коэффициент усиления
- Ti=1/Ki - постоянная интегрирования (размерность - время)
- Kd - дифференциальный коэффициент усиления
- Td=Kd - постоянная дифференицирования (размерность - время)
Очевидно, что функция содержит 3 слагаемых, первое - пропорциональное к изменению заданного параметра, второе - интегральное, а третье - дифференциальное. В дальнейшем будем использовать в рассуждениях обозначения из уравнения (2). Рассмотрим, что это такое по порядку:
Пропорциональное регулирование (П или P регуляторы) : - величина поправки в регулирующее воздействие пропорциональна величине отклонения. Логично, чем больше отклонение температуры в компате от заданного уровня, тем сильнее следует изменить мощность нагревателя для компенсации изменения. u(t)=P (коэффициенты Kd и Ki уравнения (2) равны нулю).
Интегральное регулирование: - величина поправки в регулирующее воздействие зависит от накопленного действия отклонения регулируемой величины. Спокойно, тут ничего нет сложного. Рассмотрим наш пример -если в комнате низкая температура недопустима, ибо на подоконнике находятся ценные теплолюбивые кактусы, а какой-то клоун открыл окно зимой, то пропорциональное регулирование в силу разумности своих настроек попросту не позволяет прогреть комнату. Если накопленное действие пониженной температуры растет (интеграл от изменения) , то это слагаемое даст дополнительное приращение мощности нагревателя.
Дифференциальное регулирование: - величина поправки в регулирующее воздействие зависит от скорости изменения регулируемого параметра. Тут ничего сложного нет, поскольку - если, например, температура на улице резко упала, то лучше поскорее прогреть комнату и стены, и не дать им набрать влажность. ! В гидравлических системах и в системах, имеющих собственные частоты колебаний близкие к характерным временам запуска процессов регулирования, данный вид регулирования малоприменим, так как легко вызывает гироудары или резонансы!
ПД или PD регуляторы, описать просто: Передаточная функция П (P) регулятора описывается уравнением: u(t)=P+D
ПИ или PI регуляторы описываются тоже просто: Передаточная функция П (P) регулятора описывается уравнением: u(t)=P+I (коэффициент Ki уравнения (2) равен нулю).
Уравнение (2), для целей упрощения настройки часто может быть записано как:

тут нет никакого подвоха, все то же самое, просто другая запись.
Настройка регуляторов
Связи между показателями качества
Описанные выше показатели качества связаны между собой примерными соотношениями, справедливыми только для систем не выше второго порядка:
; t p = ; ; M = .
Для регулирования объектами управления, как правило, используют типовые регуляторы, которые можно разделить на аналоговые и дискретные. К дискретным регуляторам относятся импульсные, релейные и цифровые. Аналоговые реализуют типовые законы регулирования, названия которых соответствуют названиям типовых звеньев.
Входным сигналом для аналоговых регуляторов является величина ошибки регулирования, которая определяется как разность между заданным и текущим значениями регулируемого параметра (e = х - у). Выходным сигналом является величина управляющего воздействия u, подаваемая на объект управления. Преобразование входного сигнала в выходной производится согласно типовым законам регулирования, рассматриваемым ниже.
1) П-закон (пропорциональное регулирование) . Согласно закон пропорционального регулирования управляющее воздействие должно быть пропорционально величине ошибки. Например, если регулируемый параметр начинает отклоняться от заданного значения, то воздействие на объект следует увеличивать в соответствующую сторону. Коэффициент пропорциональности часто обозначают как K 1:
Тогда передаточная функция П-регулятора имеет вид
W П (s) = K 1 .
Если величина ошибки стала равна, например, единице, то управляющее воздействие станет равным K 1 (см. рисунок 1.52).
 |
Рисунок 1.52
 Примером системы с П-регулятором может служить система автоматического наполнения емкости (сливной бачок). На рисунке 1.53 обозначены:
Примером системы с П-регулятором может служить система автоматического наполнения емкости (сливной бачок). На рисунке 1.53 обозначены:
L и L зад - текущий уровень в емкости (регулируемая величина) и его заданная величина,
F пр и F сток - расходы жидкости притекающей и стекающей из емкости.
Управляющим воздействием является F пр. F сток - возмущение.
Принцип действия понятен из рисунка: при опустошении емкости поплавок через кронштейн открывает задвижку подачи жидкости. Причем, чем больше разница уровней е = L зад - L, тем ниже поплавок, тем больше открыта задвижка и, соответственно, больше поток жидкости F пр. По мере наполнения емкости ошибка уменьшается до нуля и, соответственно, уменьшается F пр до полного прекращения подачи. То есть F пр = K 1 . (L зад - L).
Достоинство данного принципа регулирования в быстродействии. Недостаток - в наличии статической ошибки в системе. Например, если жидкость вытекает из емкости постоянно, то уровень всегда будет меньше заданного.
2) И-закон (интегральное регулирование) . Управляющее воздействие пропорционально интегралу от ошибки. То есть чем дольше существует отклонение регулируемого параметра от заданного значения, тем больше управляющее воздействие:
![]() .
.
Передаточная функция И-регулятора:
При возникновении ошибки управляющее воздействие начинает увеличиваться со скоростью, пропорциональной величине ошибки. Например, при е = 1 скорость будет равна K 0 (см. рисунок 1.54).
 |
Рисунок 1.54
Достоинство данного принципа регулирования в отсутствии статической ошибки, т.е. при возникновении ошибки регулятор будет увеличивать управляющее воздействие, пока не добьется заданного значения регулируемой величины. Недостаток - в низком быстродействии.
3) Д-закон (дифференциальное регулирование) . Регулирование ведется по величине скорости изменения регулируемой величины:
То есть при быстром отклонении регулирующей величины управляющее воздействие по модулю будет больше. При медленном - меньше. Передаточная функция Д-регулятора:
W Д (s) = K 2 s.
Регулятор генерирует управляющее воздействие только при изменении регулируемой величины. Например, если ошибка имеет вид ступенчатого сигнала е = 1, то на выходе такого регулятора будет наблюдаться один импульс (d-функция). В этом заключается его недостаток, который обусловил отсутствие практического использования такого регулятора в чистом виде.
На практике типовые П-, И- и Д-законы регулирования редко используются в чистом виде. Чаще они комбинируются и реализуются в виде ПИ-регуляторов, ПД-регуляторов, ПИД-регуляторов и др.
ПИ-регулятор (пропорционально-интегральный регулятор) представляет собой два параллельно работающих регулятора: П- и И-регуляторы (см. рисунок 1.55). Данное соединение сочетает в себе достоинства обоих регуляторов: быстродействие и отсутствие статической ошибки.
ПИ-закон регулирования описывается уравнением

и передаточной функцией
W ПИ (s) = K 1 + .
То есть регулятор имеет два независимых параметра (настройки): K 0 - коэффициент интегральной части и K 1 - коэффициент пропорциональной.
 При возникновении ошибки е = 1 управляющее воздействие изменяется как показано на рисунке 1.56.
При возникновении ошибки е = 1 управляющее воздействие изменяется как показано на рисунке 1.56.
Рисунок 1.56
ПД-регулятор (пропорционально-дифференциальный регулятор) включает в себя П- и Д-регуляторы (см. рисунок 1.57). Данный закон регулирования описывается уравнением

![]()
и передаточной функцией:
W ПД (s) = K 1 + K 2 s.
Данный регулятор обладает самым большим быстродействием, но также и статической ошибкой. Реакция регулятора на единичное ступенчатое изменение ошибки показана на рисунке 1.58.
 |
Рисунок 1.58

ПИД-регулятор (пропорционально-интегрально-дифференциальный регулятор) можно представить как соединение трех параллельно работающих регуляторов (см. рисунок 1.59). Закон ПИД-регулирования описывается уравнением:
![]()
и передаточной функцией
W ПИД (s) = K 1 + + K 2 s.
ПИД-регулятор в отличие от других имеет три настройки: K 0 , K 1 и K 2 .
ПИД-регулятор используется достаточно часто, поскольку он сочетает в себе достоинства всех трех типовых регуляторов. Реакция регулятора на единичное ступенчатое изменение ошибки показана на рисунке 1.60.
 |
Особенности П, ПИ и ПИД регулирования
Наличие в приборах функции выходного устройства ПИД регулирования подразумевает возможность реализации трех типов регулирования: П-, ПИ- и ПИД регулирования.
П регулирование
. Выходная мощность прямопропорциональна ошибке регулирования. Чем больше коэффициент пропорциональности, тем меньше выходная мощность при одной и той же ошибке регулирования. Пропорциональное регулирование можно рекомендовать для малоинерционных систем с большим коэффициентом передачи. Для настройки пропорционального регулятора следует сначала установить коэффициент пропорциональности максимальным, при этом выходная мощность регулятора уменьшится до нуля. После стабилизации измеренного значения, следует установить заданное значение и постепенно уменьшать коэффициент пропорциональности, при этом ошибка регулирования будет уменьшаться. Когда в системе возникнут периодические колебания, коэффициент пропорциональности следует увеличить так, чтобы ошибка регулирования была минимальной, а периодические колебания максимально уменьшились.
ПИ регулирование. Выходная мощность равна сумме пропорциона- льной и интегральной составляющих. Чем больше коэффициент пропор- циональности, тем меньше выходная мощность при одной и той же ошибке регулирования, чем больше постоянная времени интегрирования, тем медленее накапливается интегральная составляющая. ПИ регулирование обеспечивает нулевую ошибку регулирования и нечувствительно к помехам измерительного канала. Недостатком ПИ регулирования является медленная реакция на возмущающие воздействия. Для настройки ПИ регулятора следует сначала установить постоянную времени интегрирования равный нулю, а коэффициент пропорциональности - максимальным. Затем как при настройке пропорционального регулятора, уменьшением коэффициента пропорциональности нужно добиться появления в системе незатухающих колебаний. Близкое к оптимальному значение коэффициента пропорциональности будет в два раза больше того, при котором возникли колебания, а близкое к оптимальному значение постоянной времени интегрирования - на 20% меньше периода колебаний.
ПИД регулирование.
Выходная мощность равна сумме трех состав- ляющих: пропорциональной, интегральной и дифференциальной. Чем больше коэффициент пропорциональности, тем меньше выходная мощность при одной и той же ошибке регулирования, чем больше постоянная времени интегрирования, тем медленее накапливается интегральная составляющая, чем больше постоянная времени дифференцирования, тем сильнее реакция системы на возмущающее воздействие. ПИД-регулятор применяется в инерционных системах с относительно малым уровнем помех измерительного канала. Достоинством ПИД регулятора является быстрый выход на режим, точное удержание заданной температуры и быстрая реакция на возмущающие воздействия. Ручная настройка ПИД является крайне сложной, поэтому рекомендуется использовать функцию автонастройки.
Автонастройка ПИД регулирования в приборах ЧАО “ТЭРА”:
Главное, что определяет качество ПИД регулятора - это его способность точно и быстро выходить на заданную температуру, для чего у всех современных ПИД регуляторов обязательно присутствует функция автонастройки. Стандартных алгоритмов автонастройки ПИД не существуют, на практике каждый производитель применяет свой собственный алгоритм. Поэтому, пользователь, приобретая один и тот же товар под названием “ПИД регулятор” у разных производителей, на своем объекте может получить совсем разные результаты их применения. Основными достоинствами алгоритма автонастройки в ПИД регуляторах ЧАО “ТЭРА” являются:
- автонастройка и выход на регулирование без перерегулирования (у стандартных ПИД регуляторов перерегулирование может достигать 50-70% от заданной температуры, что на некоторых объектах регулирования технологически нежелательно или вообще запрещено)
- продолжительность автонастройки в среднем в 2 раза короче, чем у других производителей (крайне важная характеристика для объектов регулирования с часто изменяемыми свойствами, особенно для инерционных объектов)
Автонастройку можно производить при любом стабильном состоянии объекта регулирования. Кроме того, чем больше разность между начальной и заданной температурой, тем точнее определяются коэффициенты ПИД регулятора. Все коэффициенты ПИД хранятся в энергонезависимой памяти прибора.
Автонастройку необходимо повторить, если:
- изменилась мощность исполнительного устройства
- изменились физические свойства объекта регулирования (масса, емкость, теплообмен и т.п.)
- объект регулирования заменен другим неидентичным
- при значительном изменении заданной температуры